Fakulteta za strojništvo
Univerza Maribor
Rules
Only words with 2 or more characters are accepted
Max 200 chars total
Space is used to split words, "" can be used to search for a whole string (not indexed search then)
AND, OR and NOT are prefix words, overruling the default operator
+/|/- equals AND, OR and NOT as operators.
All search words are converted to lowercase.

Samoučljiva sodelovalna varilna aplikacija
Šifra | L2-60138 (C)
Naziv projekta | SAMOUČLJIVA SODELOVALNA VARILNA APLIKACIJA
Nosilec projekta | dr. Timi Karner
![]()
Raziskovalni projekt financira Javna agencija za raziskovalno dejavnost Republike Slovenije
| Spletna stran/povezava | https://cris.cobiss.net/ecris/si/sl/project/22626 |
| Trajanje projekta | 1.1.2025 - 31.12.2027 |
| Obseg financiranja | Cenovna kategorija C |
| Nosilec projekta | dr. Timi Karner |
| Koordinator projekta | Univerza v Mariboru, Fakulteta za strojništvo |
| Sodelujoče RO | Univerza v Mariboru |
| Sestava projektne skupine | Raziskovalec: Rok Belšak Raziskovalec: dr. Miran Brezočnik Raziskovalec: dr. Janez Gotlih Raziskovalec: Jernej Hernavs Vodja: dr. Timi Karner Raziskovalec: dr. Simon Klančnik Raziskovalec: dr. Tadej Peršak Raziskovalec: David Potočnik Raziskovalec: dr. Tomaž Vuherer |
Opis projekta
Mala in srednje velika podjetja se soočajo s pomanjkanjem kadra. To je še posebej očitno pri podjetjih, ki se ukvarjajo z ročnim varjenjem, zlasti v podravski regiji. Da bi podjetjem pomagali pri pomanjkanju varilnega osebja, predlagamo razvoj samoučljive sodelovalne aplikacije za varjenje. Z uporabo sodelovalnega industrijskega robota, 3D kamere ali skenerja, metod umetne inteligence in industrijskega krmilnika bi razvili samoučljivo aplikacijo. Delavec/operater bi ročno vodil sodelovalnega robota s kinestetičnim učenjem (fizično premikanje robota) do približnega položaja za varjenje. V načinu učenja s kinestetičnim pristopom bi 3D kamera ali skener iskala natančen položaj varilnih točk. Napredni algoritmi z uporabo metod umetne inteligence bi nato preračunali popravljeno trajektorijo, naučeno s kinestetičnim vodenjem, glede na podatke, pridobljene s 3D kamero ali skenerjem. To bi zagotovilo samoučljivost varilne robotske aplikacije. Uporabniku prijazen vmesnik (HMI) bi zagotovil preprostost "programiranja" robotske aplikacije za varjenje. Delavec bi na HMI zaslonu izbral način učenja in robota preprosto peljal po predvideni trajektoriji varjenja. Vse ostalo bi preračunal algoritem. Na koncu bi delavec na HMI zaslonu izbral konec učenja in izbral izvajanje programa. Samoučljiva aplikacija bi povečala fleksibilnost robotskega varjenja saj bi se čas učenja novega programa drastično zmanjšal. Integracija aplikacije bi odpravila problem pomanjkanja kadrov, kot tudi izboljšala delovne pogoje za zaposlene, saj delavec ne bi bil več direktno izpostavljen postopkom varjenja.
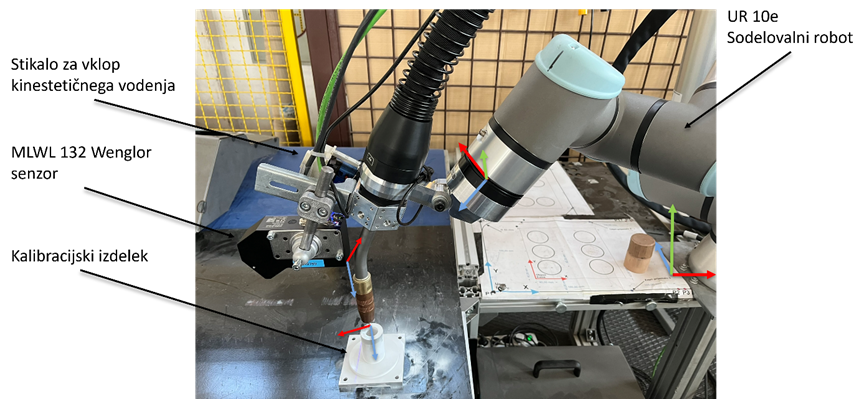
Prototip sodelovalne varilne celice
Prototip sodelovalne varilne celice
Sestava varilnega robotskega prototipa: